
GPS trackers
In general 3% of the weight of the bird is accepted as an upper limit for the weight of the tracker. On the one hand, we think that the weight should be as low as possible but on the other hand the tracker should not so small that it is covered by feathers as that would hamper the solar charging of the battery. Therefore, we developed small lightweight trackers and larger heavier trackers. The table below shows the various models. The model name (e.g. 2CDSe) is a code that stands for various characteristics of the tracker.
{kind=link}
Various models of UvA-BiTS trackers
- 2C (or 5C, 6C) is the number of solar cells. The larger the surface of the solar panel, the higher the solar yield and thus more measurements can be made.
- D (or W) is the type of antenna for communication with the antenna network. D is the internal antenna while W is a 3cm external whip antenna. We prefer the internal antenna as external antennas have shown to cause considerable extra drag (Pennycuick et al. Journal of Ornithology 2012) and because some birds (e.g. Gulls, Oystercatchers) have been able to clip off the external antenna. Nevertheless, in some cases (mainly raptors with widespread nests) we use the whip antenna because then the communication with the antenna network is better.
- S (or L, XL, XXL) is the capacity of the battery, respectively 65, 220, 600 and > 600 mAh. The battery is the energy buffer: the higher the capacity of a battery, the longer the tracker can overcome a period with no or low solar radiation like nighttime or a few days of bad weather. The measurement frequency (or the number of measurements per day) is determined by the solar yield and thus the size of the solar panel (on the long run) and the capacity of the battery (for periods with no sun).
- G stands for the addition of the GSM module that can be programmed to send SMS messages with 3-4 GPS positions.
- e (or d) stands for the strap eyes that are used to connect the leg loops or harness. d stands for the model trackers that have been developed for diving birds such as Guillemots.

Besides these standard trackers, we also made some on special request like stronger ones with more epoxy for Griffon vultures and Black eagles. We also produced trackers (5DCLeGSM and 6CDLeGSM) with GSM. More information can be found here.
The lifetime of a tracker is highly dependent on the bird species. Although the lifetime of a tracker on a raptor is generally longer than on a shore bird, our record holder is currently tracker 317 on a Lesser Black-backed Gull that has gathered already more than 5 years of data. By coincidence, results of this tracker have been published by Bouten et al. (2013). The most measurements were done on a Egyptian Vulture with more than 1.2 million GPS fixes in two years time, a Montagu’s Harrier with more than 450,000 measurements in 3.5 years time and an Eleanora’s Falcon with almost 400,000 measurements in 3 years time.
The accelerometer
The acceleration is shown in green (heave), red (surge) and blue (sway). The measurements show flapping flight (top) and soaring flight (bottom).
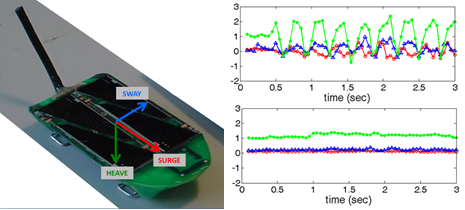
The accelerometer measures the acceleration in 3D (20 times per second). Acceleration is caused by gravity (static component) and by a change in speed (dynamic component). When the logger is static in horizontal position (solar cells up), gravity (green arrow) shows a heave (vertical acceleration, z) of +1 g (1 g = 9.81 m.s-2) while surge and heave are both 0. When the front of the logger is vertically pointing down (forward acceleration, x), surge is +1g and when it is rolled to the right (sideways acceleration, y) sway is +1g. Due to gravity, the pitch of a logger is thus translated into the values of heave, surge and sway (or z, x, y). In addition to the static component a body movement, and thus change in speed is shown as the dynamic component in acceleration. Flapping flight causes a vertical movement of the body with a periodicity of the flap frequency. This is clearly shown in the heave.