
System
The University of Amsterdam Bird Tracking System (UvA-BiTS) was developed by Edwin Baaij of the Technology Center and Willem Bouten and Judy Shamoun of the Institute for Biodiversity and Ecosystem Dynamics, all at the University of Amsterdam. It has been designed to answer the needs of people with diverse research aims and interested in tracking birds. The same system can be used to monitor fine scale foraging movements and behaviour every few seconds as well as migratory movements across thousands of kilometers. UvA-BiTS is a flexible and modular system providing users with control of their tracking studies, even while trackers are on free-ranging birds.

Key features of the system include a solar-powered, lightweight GPS tracker with rechargeable batteries, multiple onboard sensors including a tri-axial accelerometer, two-way data-communication to a ground station network, automated data transfer, data processing and visualization. The combination of programmability and two-way data communication is a unique feature that enables the user to tailor the measurement scheme to the needs of the research while the tracker is still on the bird. The history of how the trackers were developed can be found here.
GPS Trackers
The trackers are available in different models that can be fit on a large variation of species. In general they are deployed using either leg loops or a harness. The trackers differ in size and weight but all have the following (electronic) sub-systems:
The trackers are available in different models that can be fit on a large variation of species. In general they are deployed using either leg loops or a harness. The trackers differ in size and weight but all have the following (electronic) sub-systems:
{kind=link}

- GPS engine
- Microcontroller
- 32 MB flash memory
- Temperature sensor
- Tri-axis accelerometer
- Barometric pressure sensor (only on request)
- Solar panel
- Lithium polymer battery
- Battery charging circuit
- Zigbee two-way radio transceiver
- Weight: 7.2-22.5 g
- Battery capacity: 65 mAh up to 600 mAh
{kind=link}
The GPS device is a data logger that can be programmed remotely. Using a Zigbee two-way transceiver unit, data can be remotely downloaded from the logger and new measurement settings can be uploaded. The diverse measurement scheme features make it possible for the user to create a scheme that takes high resolution measurements at certain times, locations, or under other special conditions and lower resolution measurements at other times. The 32Mb flash memory is capable of storing 500,000 GPS fixes. It is used as a circular memory, so once data is downloaded, memory is free to be used again. We just added an SMS messaging service as a new feature which communicates the position of the tag/bird from anywhere so that it can be recovered even if it is not near a base station. More information on the trackers can be found here.
Data transmission and coordination

The UvA-BiTS field unit consists of one base-station (a base antenna and netbook), one or more extra relays and GPS trackers on birds. The base-station is the system’s coordinator. The computer runs the Birdtracking program to download and store the data in files, and is also the user’s graphical interface to design new measurement schemes for upload. The interface can be controlled remotely using the internet and LogMeIn. Data is transmitted to the UvA-BiTS ground station network with no additional cost for data communication which is crucial for a system that can collect massive amounts of data. The tracker can only communicate inside the reception area. Outside this area, it logs all data until the next time in connects to the network. The relay stations are important signal repeaters and together with the base-station define the area of reception. A reception area of hundreds of square kilometers is feasible. The relay-stations are weather proof and battery powered and can operate for three months on one battery-pack.
At remote locations, the base station can be run on a small to medium solar-energy system and the netbook can be connected to the internet by a GSM USB dongle, a 3G router or other dedicated way.
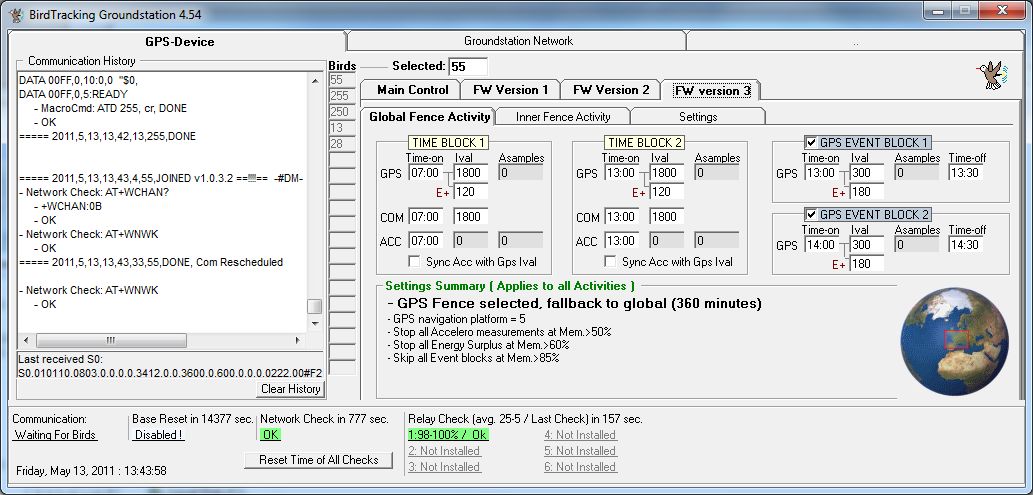
Base station software and measurement schemes
A basic measurement scheme runs 3 tasks: GPS measurements, accelerometer measurements and communication. Each task is defined by a repeat interval in seconds. The interval can vary from 3 to 60.000 seconds. Mostly GPS intervals range from 3 (high resolution) to 7200 seconds. Communication ranges mostly from 300 to 1800 seconds.
Accelerometer measurements, generally used to identify behaviour, are mostly taken independently or directly following a GPS fix, to provide a geo-location and speed for the accelerometer measurements. To create more flexibility, each task can be programmed separately for two different time blocks per day, two extra events and two different geographic areas. One additional feature is the Energy Surplus feature. When enabled, the GPS measurement interval is temporarily lowered to a user specified interval as long as the battery is full.
Virtual Lab
The Virtual Lab is an eScience research infrastructure for handling the massive amounts of data that can be obtained with the UvA-BiTS.
Through the internet and the use of Dropbox, the stored raw GPS data on the netbook is automatically transferred to the Virtual Lab, postprocessed and stored it in a centralized spatial PostGreSQL database. The user can monitor the performance of the loggers on the basis of summary statistics and can generate KML files of their own GPS data for visualization in Google Earth. Users can query their own and public data in the database, by using a graphical query builder or a Structured Query Language (SQL).
Conditions of Use
We kindly ask you to respect the intellectual property rights of the academics posting their work on this website. As such, information and content, including images and data, provided on this website may not be copied, reproduced or republished in any form without the express written permission of the UvA-BiTS manager: (j.z.shamoun-baranes@uva.nl)
{kind=link}
Contact persons
Prof. dr. J.Z. (Judy) Shamoun-Baranes, Institute for Biodiversity and Ecosystem Dynamics j.z.shamoun-baranes@uva.nl
Participants
- University of Amsterdam Technology Center
- University of Amsterdam Institute for Biodiversity and Ecosystem Dynamics